옛날에 만든거라 정보가 적음
재료
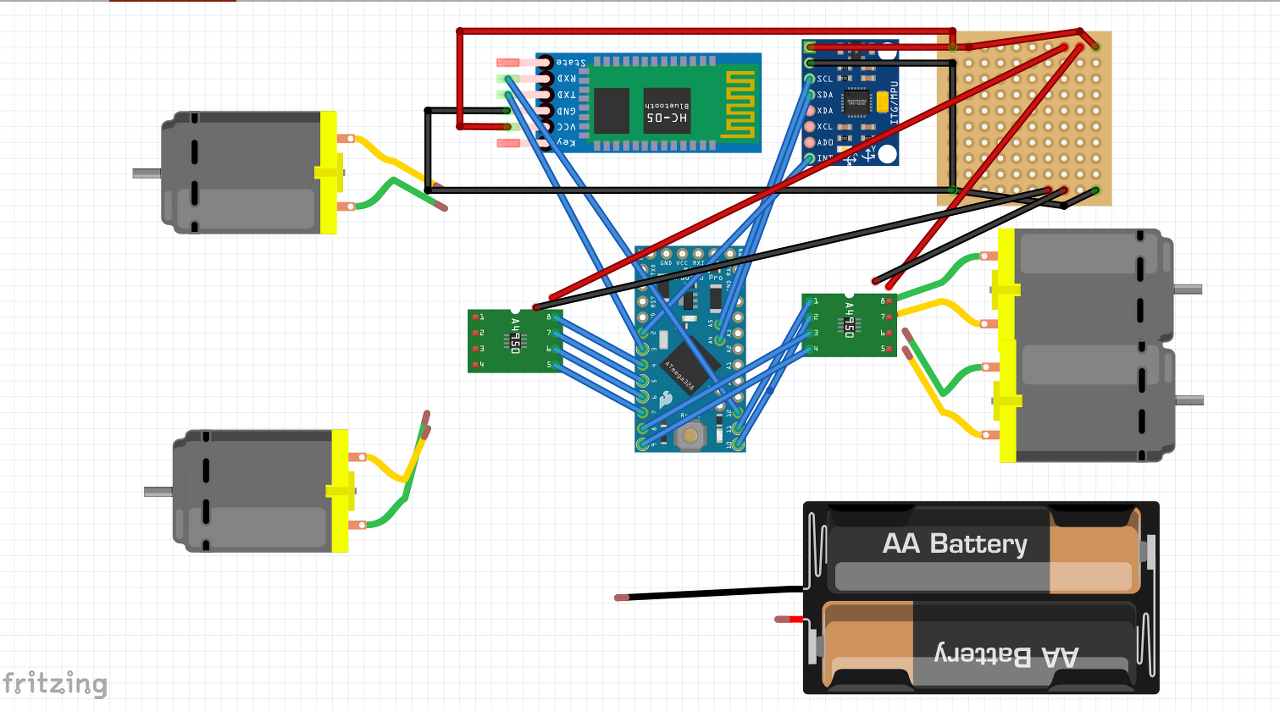
아두이노 프로미니, 기울기-가속도센서 (mpu-6050), 블루투스 모둘 (HC-06), 프로팰러, 바디, 모터4개, 모터드라이버, 배터리
설명
블루투스를 이용해 스마트폰으로 드론 조종
기울기-가속도센서를 이용해 PID제어를 통한 균형제어

A가 정면인 드론, B가 정면인 드론 2가지 방법의 드론이 있다.
A가 정면인 경우 전진하기 위해서는 1번 프로펠러의 출력을 줄이면 앞으로 기울어져서 앞으로가며 2,3번 프로펠러로 좌우 균형을 잡는다
B가 정면인 경우 전진하기 위해서는 1,2번 프로펠러의 출력을 줄이며 1~4번 모두를 컨트롤해서 균형을 맞춰야한다
간단하게 A형태로 만들고 싶었으나 바디에 기울기센서를 대각선으로 넣기 힘들어서 B형태로 만들기 시작했다
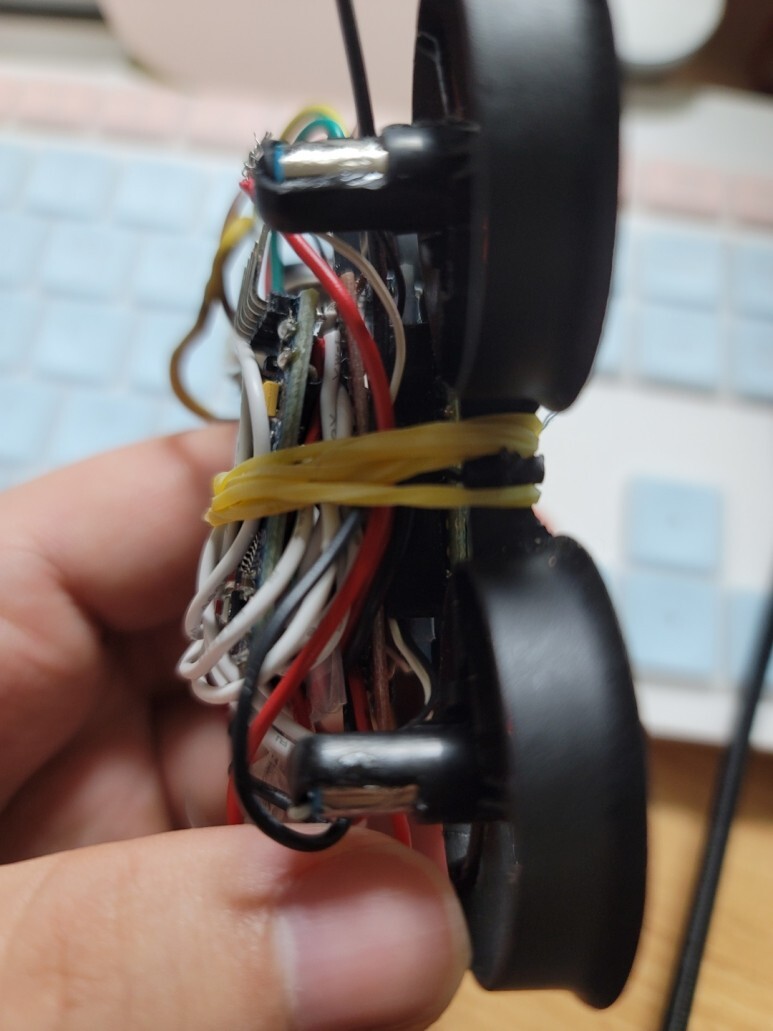
회로도 및 사진

결과
결론적으로는 실패했다
배터리제외 무게가 37g, 배터리 무게가 16g인데 몸체는 뜨는데 배터리에 발목잡혀서 완전히 뜨지못했다
(프로팰러 돌아가는 소리도 크고 바람도 쌨는데 못떴다..)
개선법
현재 배터리의 용량이 650mAh인데 더욱 더 소형을 쓴다
무게를 줄인다고 PCD판에 납땜안하고 전선을 썼는데 전선이 많다보니 오히려 무게가 많이 나가게되었으므로 PCD판에 납땜을 한다.
이렇게 무게를 줄인다면 10g은 줄일 수 있을것 같다
코드
'Project > arduino' 카테고리의 다른 글
| 대기 상황 무드등 (0) | 2022.08.10 |
|---|---|
| 간단한 부화기 만들기 (0) | 2022.08.10 |
| 재난구역 인명탐사 rc카 (0) | 2022.08.03 |
| 서버로 데이터 보내는 온습도계 (0) | 2022.08.02 |
| 식물 생장등 자동으로 on off하기 (0) | 2022.05.05 |